|
| Bienvenue |
| Retour |
| Guidage - |
||
|
Ceci est une traduction libre du PDF de Craig Stark le créateur de PHD Guiding : What to do When PHD Guiding isn't Push Here Dummy PHD Guiding a été conçu pour être aussi simple que «Push Here Dummy" (Appuie là crétin). Quand tout fonctionne, c'est génial (et bien souvent c'est le cas !). Mais, que faire quand ça ne fonctionne pas ? Que faire quand vous avez passé une nuit après l'autre, à essayer de le faire fonctionner et qu’au final vous ne récoltez que frustration et peine ? Une option consiste à jeter l'éponge. Une autre est de se tourner vers les forums ou envoyer un e-mail au créateur. Une troisième option consiste à diagnostiquer le problème soi-même. Les explications qui suivent sont conçues pour vous permettre de le faire. Si ça ne vous parle pas, ça devrait au moins vous permettre d’en savoir beaucoup plus au sujet de votre problème ce qui facilitera la tache aux autres pour vous aider. Il y a en tout cas de grandes chances que la solution à votre problème se trouve quelque part ici. Ces différentes solutions ne se limitent d’ailleurs pas seulement à PHD mais aussi à tous les autres logiciels de guidage. La première chose à savoir c’est qu'il y a un certain nombre de raisons pour lesquelles vous pourriez ne pas avoir des étoiles rondes et qui n'ont rien à voir avec PHD Guiding lui-même. Donc, avant de plonger dans divers paramétrages, nous devons nous assurer que PHD est bien à l'origine du problème. Il s’avère d’ailleurs que dans la grande majorité des cas, les problèmes ne proviennent pas des différents paramètres à entrer dans PHD. Nous allons donc d'abord étudier les autres options pour lesquelles vous pourriez avoir un mauvais fonctionnement ou des problèmes de calibration qui n'ont rien à voir avec L'hystérésis, l'agressiveness, etc ... Lisez chacune d'elles pour essayer de déterminer laquelle correspond le mieux à votre problème. Et seulement une fois que vous aurez exclu toutes les options ci-dessous vous pourrez vous tourner vers le peaufinage des paramètres. Le calibrage s'effectue mais mes étoiles sont de forme oblongue. Maintenant, si toutes vos étoiles sont de forme oblongue et que la déformation est dans la même direction, vous pourriez bien avoir des problèmes de guidage que la modification des paramètres aiderait à résoudre. Cependant,avant de vous y plonger, il y a une vérification très importante à faire consistant à déterminer si votre chaîne optique ou mécanique n’est pas en cause. La première étape est de s'assurer que votre collimation est bonne. Utilisez un oculaire de fort grossissement, choisissez une étoile brillante, dé-focalisez légèrement, voyez-vous de beaux cercles concentriques ou sont-ils décentrés ? Dé-focaliser dans l'autre sens, obtenez-vous la même chose ou était-ce oblong dans un sens et d'un côté et maintenant dans l'autre sens et de l'autre côté ? Les cercles non concentriques indiquent une mauvaise collimation: 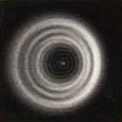  Et les différentes orientations des cercles de diffraction indiquent un astigmatisme: 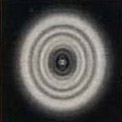 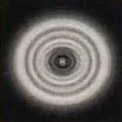 Si vous n'avez pas de points de lumière qui atteint le capteur, PHD ne pourra pas vous aider. Il vous faut donc corriger la chaine optique. Si l'optique semble bonne, pointez sur une étoile brillante (mais pas vers le zénith) et faites une pose de courte durée sans guidage. Ensuite, tournez votre camera de 90 ou 180 degrés et faites une seconde pose. En une seconde (ou valeur de l’exposition), votre monture ne devrait pas montrer beaucoup de défaut (si c'est le cas, il est temps de penser à une nouvelle monture !). Si les expositions montrent des étoiles oblongues, vous avez un problème d'alignement entre votre capteur et le plan focal. Examinez la direction du problème dans l’image, puis dans celleoù vous avez fait pivoter la caméra. Est-ce que la déformation va dans la même direction, ou a-t-elle bougé ? Si ça a bougé, cela signifie probablement que l'erreur est physiquement vers le bas. La gravité est en train de faire ce qu'elle fait le mieux et tire sur votre montage. Toutes flexions dans les tubes, viseurs, adaptateurs, etc. tireront sur votre capteur. Par contre, si le problème est toujours dans la même direction par rapport au capteur, même si vous avez fait pivoter la caméra, c’est que votre capteur ne doit pas être en place par rapport à son support (par exemple, par rapport au corps de l’appareil, inclinaison (tilt)). Encore une fois, il n'y a rien que le guidage peut améliorer à ce sujet. Mes étoiles sont de forme oblongue et le graphique de PHD montre sauts en RA ou DEC. Sur chaque échantillon de l'étoile, PHD essaie de comprendre où est la position relative de l'étoile afin d'en verrouiller la position et envoie alors une correction à la monture afin de réduire l'erreur. Si un grand saut se produit, c'est que l'étoile se sera déplacé sans aucune action de PHD ou parce qu'une des commandes de PHD a fait se déplacer la monture plus que ce qu'elle n’aurait dû. Pour l'instant, nous allons oublier la dernière option. Des bugs peuvent se produire dans le code, mais cette partie du code a été stable pendant si longtemps qu'il y a de grandes chances que ce soit autre chose. Que cela pourrait-il donc être? Il peut sembler étrange de penser que l'étoile se soit déplacée sans l'intervention de PHD, mais en réalité ça arrive assez fréquemment. Comment ? L'engrenage est un premier coupable. Les pignons n'engrènent jamais parfaitement et le petit jeu donne aux pignons l'espace pour basculer d'avant en arrière. Lorsque cela se produit, le champ se déplace et donc dans PHD l'étoile se déplace. Rappelez-vous, une seconde d'arc est 1/3600e de degré ou environ 1/7200e de la largeur de votre pouce à bout de bras. Ce n'est pas beaucoup ! Pourquoi cela basculerait-il dans l'engrenage ? Typiquement, cela vient de gens un peu obsédés par l'équilibrage. Si votre télescope est parfaitement équilibré, il est très facile de la pousser d'un côté puis de l'autre dans l'engrenage. Déséquilibrez un peu la monture et elle sera sollicité d'un côté (l'Est est mieux que l'Ouest pour RA). Maintenant, un contact léger ou une légère brise sera beaucoup moins susceptible d'accentuer ce problème mécanique. Les deux axes doivent être modérément déséquilibrés. Une deuxième source possible, c'est la saleté dans les pignons. Cela peut provoquer des mouvements beaucoup plus rapides que prévus, ce qui conduit à un saut clair (les morceaux de métal modifient la surface de contact des pignons). Les nettoyer ou ignorer ces sauts occasionnels sont vos seules vraies solutions. Vous saurez si vous avez ce problème, si vous générez une courbe d'erreur périodique (PE) (voir ci-dessous). Je regarde le graphique de PHD, tout semble parfait, mais mes étoiles sont encore oblongues. Donc le graphe de PHD montre les petites erreurs qui sont systématiquement corrigées. Quand vous la regardez, l'étoile reste à l'intérieur ou très près du réticule. Ainsi, le réticule (où PHD pense que l'étoile est) est systématiquement bien aligné avec la mire (position de verrouillage). Pourtant, votre image principale montre des problèmes. D’un côté c’est bon, tandis que de l'autre non. PHD fait son travail en gardant l'étoile guide en place. Toutes vos données : le graphique, le fichier log avec de petites erreurs et la fenêtre, indiquent que le guidage est bon. Il ya deux options à considérer. Tout d'abord, vous devez évaluer si vous n’en demandez pas un peu trop à votre guidage. Si vous utilisez une lunette guide très courte en essayant d'imager sur un 14 "f/10, vous poussez un peu loin la notion que "La focale de guidage n'a pas d'importance". Une lunette guide à grande focale ou un imageur à courte focale est sans doute approprié. Grâce à cette longueur focale sur votre télescope principal, vous êtes probablement même en dessous d'une demi-seconde d'arc par pixel. À moins que vous ayez une super monture et un ciel stable ou que vous savez vraiment parfaitement comment fonctionne votre équipement, réfléchissez longuement et sérieusement à adapter vos focales. Si vous y commencez juste, adapter vos focales pour guider bien en-dessous d'une seconde d'arc d'erreur n'est pas futile. Nous y reviendrons plus tard. Il y a une autre possibilité réelle cependant, et c'est la flexion. Déterminer si c'est la flexion ou le mauvais guidage est assez simple. Une méthode est de simplement faire une pose de 30 minutes ou de faire une série d'expositions relativement courtes (1 minute ou moins) et les faire défiler. Voyez-vous la dérive aller et venir dans une seule direction (RA)? Si c'est le cas, l'erreur périodique de votre monture n'est pas pris en charge malgré le bon comportement apparent par PHD (Imagez vous à des focales très longues?). Sinon, et si la dérive semble n’être que dans un sens, il y a des chances que vous ayez de la flexion. Rappelez-vous, toutes les données ont indiqué que PHD contrôlait à la fois l’erreur RA et Dec et pourtant votre photo principal indique une migration régulière des étoiles à travers les images. L'étoile guide est stable, mais l'image principale a bougé. Cela signifie qu'elles se déplacent les unes par rapport aux autres et la seule origine possible est d’ordre mécanique. Vos focusers, bagues, et même OTA eux-mêmes peuvent se tordre (fléchir). Lorsque la monture tourne, la direction de gravité tire et la charge sur les pignons change, conduisant à ce différentiel de flexion. Peu importe comment PHD tient l'étoile en place, vous obtiendrez cette erreur et il n'y a rien que PHD puisse faire à ce sujet. Vous devez œuvrer afin d'obtenir quelque chose plus robuste. (À noter, les diviseurs optiques souffrent très peu de ce problème.) Mes étoiles étaient bonnes pour une cible et mauvaises pour une autre dans la même nuit. PHD fonctionne en sachant comment l'étoile se déplace pour une quantité d’activités motrices RA et DEC donnée. Si vous avez dérivé sur une partie différente du ciel, les vecteurs PHD utilisés doivent être mis à jour en ré-exécutant le calibrage. Vous devez cocher la case „Force calibration" dans les options avancées, choisir votre nouvelle étoile et cliquer "Guide" pour re-calibrer PHD. Si vous l'avez déjà fait, pensez une nouvelle fois à l'équilibrage et à la flexion.
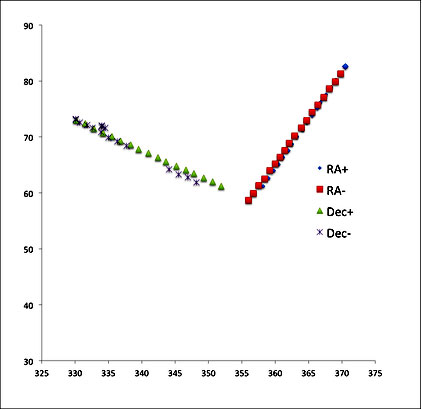
La calibration échoue - pourquoi? Le calibrage de PHD consiste à répéter en boucle le procédé suivant : faire une prise, trouver l'étoile et déplacer un peu le champ et à chaque fois déterminer de combien de pixel l'étoile s'est déplacée de la position initiale (là où se trouve la mire). Il répète cela jusqu'à ce que l'étoile se soit "assez" déplacée (définie comme 5% de la hauteur de l'écran). La calibration échoue lorsque l'étoile ne bouge pas assez. Nous devons donc nous demander pourquoi? L’encadré 2 vous aidera à comprendre la partie calibrage du fichier de log de PHD. Si vous tracez le graphique à l'aide d'un tableur (voir encadré 1), vous pourrez rapidement voir si il ya quelque chose qui cloche. Si vous ne le tracez pas, alignez votre caméra de guidage avec l'axe RA et DEC de sorte que l'un s'aligne avec l'axe x et les autres avec l'axe y, ça aide vraiment. Idéalement, RA- rebouclera sur RA+ et terminera à peu près au même endroit qu’au point de départ. DEC+ se déplace perpendiculairement au mouvement RA (si RA est le long de l'axe x, DEC+ sera le long de l'axe des y). DEC- ne va probablement pas finir où vous avez commencé (résultat du jeu dans l'engrenage DEC), mais devrait être sur la même ligne que DEC+. Que pourriez-vous voir qui ne ressemblerait pas à ça?
L'étoile ne bouge pas du tout. PHD envoie des instructions de guidage, mais l'étoile ne bouge pas beaucoup. Une raison possible serait que les commandes de guidage n'arrivent pas à la monture. Vérifiez que vous avez sélectionné la bonne option dans le menu "Mount". Si vous avez choisi "on camera" mais que vous n'avez pas de câble allant de la caméra à la monture, le paramétrage est faux. "On camera" signifie que vous utilisez le port ST-4 de la caméra et c'est ce que PHD utilise pour se déplacer. À ce stade, utilisez l'outil "Manual Guide" (guidage manuel) pour envoyer des commandes de guidage sur la monture. Ça sera faible, mais vous devriez être en mesure d'entendre les moteurs de votre monture changerquand vous le ferez (un stéthoscope ou un tube de caoutchouc peut aider). Vous utilisez le port ST-4 et rien ne passe à travers? Vérifiez que le contrôleur de votre monture est configuré pour le port de guidage. Certaines montures (par exemple, le Losmandy, Gemini) doivent être en mode "Photo" pour communiquer avec ce port. PHD envoie les instructionsde guidage, mais la monture les ignore. Vous utilisez le port ST-4 et seulement du Sud fonctionne ? Cette situation apparemment étrange arrive plus souvent que vous ne le pensez. C'est un problème de câble. Les caméras de guidage SBIG s'attendent à un câble "croisé" RJ tandis que d'autres s'attendent à un câble "droit". Si vous maintenez votre câble RJ sorte que les deux extrémités soient dans le même et regardez les couleurs des petits fils à l'intérieur, vont-ils dans le même sens (droite) ou inversés de sorte que si vous essayez de les brancher ensemble, les couleurs se superposent ? Sauf si vous utilisez une caméra SBIG, vous utilisez probablement un câble "droit". Remarque, deux câbles "croisés" jointifs (successifs) forment un câble droit. Le mouvement aller-retour des étoiles n'est pas bon. DEC n'est pas perpendiculaire non plus. PHD envoie des informations pour accélérer et ralentir votre moteur RA mais l'étoile ne revient pas au même endroit. Si vous avez imprimé un graphique, les lignes RA forment un "V". Il ne peut y avoir qu'une seule explication à ce problème qui consiste à avoir une partie de ce même mouvement qui survient lors de la calibration DEC.PHD va supposer que RA + et RA- font des choses opposées. Pourtant, le calibrage montre que tandis qu’ils se déplacent dans des directions opposées d’un certain degré, un autre élément intervient indépendamment du fait que RA +, RA-, ou même que DEC+/-soient engagés. Cette étoile dérive parce que vous n'êtes pas bien dans l'alignement polaire. Être hors du pôle est ce qui provoque la dérive DEC et si vous êtes parfaitement aligné, vous n'avez même pas besoin de guidage en DEC. Un petit désalignement est acceptable (et certains le font intentionnellement pour conserver les engrenages en contact), mais si vous voyez un "V" en moins d'une minute de calibration, vous avez beaucoup trop de dérive (PHD pense que cette dérive est liée à l'effet qu'il a sur l'étoile en activant les moteurs!). Vous devez travailler sur cet alignement. De temps en temps, les utilisateurs insistent pour que leur alignement soit parfait et ils font un alignement sur trois-étoiles avec le système Goto pour s'en assurer. Les modèles trois étoiles sont super puisqu’ils utilisent assez de points de repère pour déterminer non seulement quelle erreur existe dans la position votre télescope (une étoile est nécessaire pour cela), mais aussi dans quelle mesure vous êtes hors du pôle (et à quel point votre monture n’est pas orthogonale). Ces points de repère sont utilisés par le contrôleur pour que vos GOTO soient précis malgré votre désalignement polaire. Mais, une fois l'objet pointé, seul le moteur RA tourne à 1x et se déplace le long de l'axe RA. Pourtant, pour suivre précisément, vous aurez besoin à la fois du déplacement RA et du DEC puisque vous êtes hors du pôle; vous vous êtes rapproché du mouvement d'une monture AltAz au lieu d'une équatoriale. Rechercher sur le Web des tutoriels d'alignement de la dérive ou des tutoriels d'alignement itératifs de Goto. Une fois à l'aise avec ceux-ci, ça ne durera pas longtemps,votre guidage (et vosshoots) deviendront bien meilleurs. Le calibrage a fonctionné sur les autres nuits, mais pas ce soir et pourtant les signaux arrivent à la monture. Rappelez-vous, PHD cherche à avoir un mouvement d'étoile de 5% de la taille de l'écran. Si vous avez changé la lunette de guidage avec une focale plus courte, ça va prendre plus de temps pour déplacer l'étoile d'autant. De même, imagez-vous près du pôle céleste? Si c'est le cas, il faudra des impulsions de guidage plus longues pour déplacer la monture. Il y de fortes chances que dans ces situations, l'augmentation du "calibration step size" dans le panneau avancé va résoudre les problèmes. Cela va allonger la durée de chaque impulsion lors de la calibration pour obtenir plus de déplacement à chaque étape. Une dernière remarque : vérifiez votre taux de guidage dans le contrôleur de votre monture. Quand vous guidez manuellement, un taux de 0.5x peut être correct (ce qui revient pour le suivi de la monture à 0.5x ou 1.5x). Vous n'aidez pas PHD de cette manière, vous augmentez juste le temps de calibration et de correction en utilisant autre chose que le suivi pleine vitesse (1x). Outils de diagnostic. Si l'approche de la recette ci-dessus ne résout pas vos problèmes ou si vous voulez en savoir plus sur ce qui se passe, il est temps de se tourner vers quelques outils professionnels qui vous aideront à comprendre. Les portions d’informations les plus utiles que vous pouvez avoir se trouvent dans le fichier log que PHD générera si vous le lui demandez (panneau Avancé ou dans le menu Outils). L'encadré 1 passe en revue les bases et la façon de lire le fichier de log. Prenons ici pour commencer certains diagnostics. A quoi suis-je confronté ? Génération d'une courbe d'erreur périodique. Un élément clé à déterminer est simplement le type d'erreurs que PHD doit corriger. Pour le voir, nous devons générer une courbe d'erreur périodique (PE). Lancez les choses jusqu’à ce que PHD soit calibré, idéalement avec une étoile sur le méridien. Si elle est hors méridien, notez l'angle de déclinaison de l'étoile que vous utilisez, cela vous permettra de convertir l'erreur en secondes d’arcs absolus. Une fois tout réglé, arrêtez le guidage et dirigez vous vers le panneau Avancé et cochez "Disable guide outputs". Ce que cela va faire, c’est de dire à PHD de faire tout ce qu'il ferait normalement, mais en sautant la partie où il essaie de corriger l'erreur. Alors ici, assurez-vous que l’enregistrement est activé. Maintenant, commencez à "guider" sur l'étoile comme vous le feriez normalement. Vous verrez le réticule comme l'étoile se déplacer et dériver de la position de verrouillage. Avec un peu de chance, peu après, il reviendra en position (sinon, votre alignement polaire a besoin d’être corrigé). Laissez fonctionner au moins 10 minutes - idéalement une demi-heureou plus - puis arrêtez le guidage, éteindre et copier le fichier de log sur la machine sur laquelle vous analyserez les résultats. Il y a plusieurs excellents analyseurs de fichiers log, n'hésitez pas à les utiliser. Ils peuvent très bien automatiser ce processus. Si vous utilisez une feuille de calcul, cela va vous montrer l'erreur en RA au cours du temps, mais vous obtiendrezégalement une foule d'informations en traçant simplement la colonne de RADistance dans un graphique linéaire. Faire un tracé XY avec X colonne Temps et Y colonne RADistance. Puis, convertir la colonne RADistance en secondes d'arc en utilisant la formule: Si votre étoile est sur le méridien, vous pouvez omettre le cos (Declinaison Etoile) puisqu'il amplifie l'erreur à corriger de votre éloignement par rapport au méridien. Tant que vous en êtes là, faites un autre tracé pour la colonne DECDuration. Maintenant, jetez-y un œil. Idéalement, votre DECDuration sera centrée sur 0 et oscillera juste un tout petit peu. Le mauvais alignement polaire sera indiqué par une dérive constante. Si vous voyez un saut, rappelez-vous, ce n'est pas la faute de PHD (car PHD n'envoie aucune commandes de guidage). Quelque chose d’autre a causé le sursaut de l'étoile. Si elle a sauté aussi en RA, pensez que la monture aurait pu basculer dans les engrenages. Pour en revenir à la courbe RA, la courbe idéale serait une onde sinusoïdale lisse, ondulant progressivement de haut en bas. Est-ce seulement un mouvement de bas en haut ou y at-il une dérive constante de la forme d'onde sinusoïdale? Si c'est le cas, encore une fois, votre alignement polaire est mauvais. En dehors de cela, y a-t-il de grands pics dans la courbe ou des zones avec des changements très rapides ? Si c'est le cas, vos vis sans fins ne sont pas lisses. Commencez à penser à nettoyer et re-graisser les engrenages. Quelle est l'ordre de grandeur de l'erreur globale? Parlons-nous de valeur proche de 10 secondes d'arc ou proche de 100 secondes d'arc? S'il s'agit de ce dernier, demandez-vous si essayer d'imager à 0.5 "/ pixel est vraiment raisonnable sur cette monture. À ce stade, revenir au fichier log (ou le générer) avec le guidage encore activé et faire le même tracé. Cela vous montrera combien il reste d'erreur et en comparant les deux,de combien l'erreur a été corrigé par PHD. Vous pouvez analyser la courbe PE beaucoup plus en profondeur en utilisant des progiciels d'analyse comme PEAS. Ces progiciels feront également des analyses FFT (Fast Fourier Transform) sur la courbe pour déterminer quels composants de fréquence qui sont à l'intérieur de votre courbe. Ce type d'analyse peut vous aider à déterminer d'où l'erreur provient. Non seulement votre vis sans fin est une source d'erreur, mais d'autres composants : arbres et engrenages vont introduire leur propre erreur (Simplement, la vis sans fin est généralement la plus grande source d'erreurs). Par exemple, ma monture Losmandy G11 est connue pour avoir une erreur avec une période de 76 secondes qui provient de problèmes dans la vis sans fin. Comme nous pouvons le voir dans l'analyse avec PEAS, ma monture a ce problème, mais pas en grandes quantités. Ainsi, je peux savoir où je dois commencer à regarder (et où je peux ignorer) si je veux ajuster certaines choses et laisser à PHD moins à corriger. Utilisation du fichier log. L'encadré 1 vous a montré comment commencer à regarder le fichier de log (vous avez pensé à l'activer, n'est-ce pas?). Si le guidage était incontrôlable dans la nuit, utilisez les dateurs de vos images pour déterminer à quel moment c’était et puis regardez dans le fichier journal (log). Voyez-vous quelque chose autour de cette période ? La masse de l'étoile a-t-elle généré un pic ? PHD a-t-il perdu l'étoile? Envoyait-il des impulsions de guidage, mais c’était la quantité maximum autorisée (selon vos paramètres avancés) ? Utiliser le graphique PHD peut tracer en temps réel le RA/Deccourant ou l'erreur dx/dy actuel pour vous permettre de voir comment ça tourne. Utilisez-le pour voir si la dérive est constante ou s'il y a des pointes de temps en temps. Il vous donnera également l'erreur de RMS (en pixels) et un terme opaque : "Osc-index". Ce terme est la probabilité que l'erreur actuelle de guidage RA soit dans le même sens que la précédente (il compte les impulsions RA «différent» et «même» côté). S'il n'y avait pas de PE dans votre monture, la valeur idéale serait de 0,5. Toutes les montures ont du PE (PeriodicError) et donc la probabilité idéale est inférieure à 0,5. Lorsque vous bougez la courbe PEvers le haut (ou le bas), vous allez continuer à faire des corrections de guidage dans le même sens et cela peut prendre un certain temps avant que vous ne basculiez dans l’autre sens. Les montures très régulières auront des paramètres Osc-index idéaux bas. Les montures avec courbes PE irrégulières auront des Osc-index idéaux plus hauts. Il n'y a pas de valeur idéale claire ici, mais des valeurs sur une plage de 0,25-0,4 sont généralement bonnes. Ça vous permettra au moins de surveillerles effets de vos changements. Alors, quels paramètres dois-je régler? Si vous êtes arrivé jusqu'ici et rencontrez toujours des problèmes, il est temps de penser à l'ajustement des paramètres. OK, très bien, même avant ce stade, vous auriez pu vouloir ajuster certains paramètres. Lesquels et que font-ils? Paramètres auxquels tout le monde devrait réfléchir. Les valeurs par défaut sont là pour une bonne raison et elles fonctionnent bien pour la plupart des situations, mais il y a certains paramètres auxquels tous les utilisateurs doivent réfléchir un peu.
Après ça, les prochains à considérer sont le Dec guide mode / algorithm et le RAaggressiveness et hysteresis
Conclusions Eh bien, maintenant vous l'avez. C'est un petit guide de dépannage pour quelque chose qui est censé être "Push Here Dummy". Très peu de ces pannes, cependant, sont dues à PHD ou aux paramètres de contrôle du programme de guidage. L'équilibrage, la flexion, etc ... peuvent faire des ravages sur la précision de votre guidage. Si vous n'avez pas cela sous contrôle, vous vous battrez avec le guidage à chaque fois. Si vos commandes de guidage n'arrivent pas à la monture, vous vous battrez encore (et vous perdrez à chaque fois). Si votre alignement polaire n'est pas correct, vous demanderez constamment au guidage de retirer des erreurs substantielles. Si vous pouvez réunir les meilleures conditions pour que votre monture soit physiquement opérationnelle, votre système de guidage, que ce soit PHD ou autre chose, va gagner beaucoup de temps pour obtenir des étoiles rondes. Espérons que cela vous a aidé à comprendre un peu à la foiscomment fonctionne PHD et comment le faire fonctionner lorsque tout semble perdu.
|